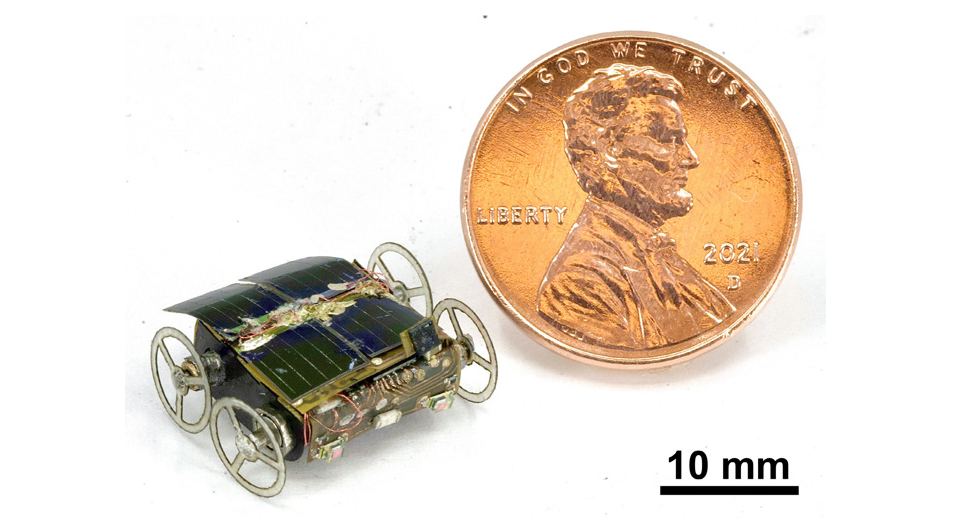
Американские инженеры разработали миниатюрного четырехколесного робота MilliMobile с массой около грамма, который не имеет собственного источника питания на борту. Для работы электромоторов и бортовой электроники робот использует энергию света или радиоволн. MilliMobile может развивать скорость до 5 миллиметров в секунду по поверхностям с различным покрытием, включая, например, бетон или ковер. При этом он способен перевозить полезный груз, масса которого в три раза превышает собственный вес робота. Доклад с описанием робота авторы представят на конференции ACM MobiCom 2023 в Мадриде.
При поддержке высокопроизводительного и масштабируемого российского веб-сервера Angie
Одно из передовых направлений в робототехнике, которое считается перспективным, но пока далеко от практического применения, связано с разработкой миниатюрных роботов. Помимо подбора эффективных актуаторов, инженеры, работающие в этой области, сталкиваются с другим, возможно даже более важным вопросом, который связан с выбором подходящего источника энергии. От него зависят многие параметры будущего робота, такие, например, как продолжительность работы, грузоподъемность, расстояние, которое он может преодолеть и другие.
Уменьшение размеров батареи приводит к снижению емкости, что вместе с невысокой плотностью энергии не позволяет полноценно использовать их для поддержания длительной автономной работы робота. Однако, как продемонстрировали инженеры под руководством Викрама Айера (Vikram Iyer) из Вашингтонского университета, миниатюрный робот может и вовсе обойтись без источника энергии на борту. Разработанный ими четырехколесный робот массой 1,1 грамма под названием MilliMobile для работы всех систем использует энергию света или радиоволн.
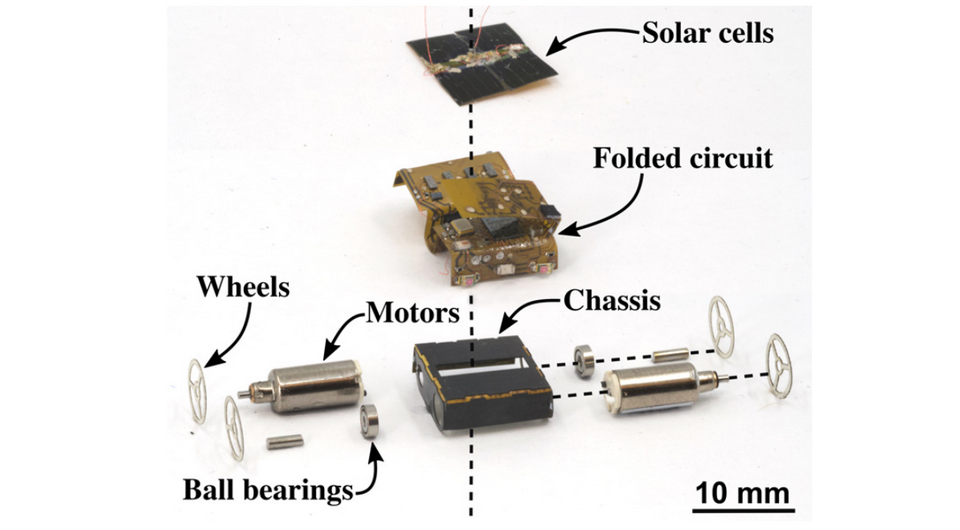
Шасси робота изготовлено из углеродного волокна и полиимида. Четыре колеса — из тонкого стеклотекстолита. Одно из двух колес с каждой стороны имеет привод от собственного электромотора. Для движения вперед питание подается на оба мотора одновременно, а для поворотов в стороны — только на один из них. Это повышает маневренность робота и позволяет ему разворачиваться на месте в ограниченном пространстве. Вся электронная начинка расположена на гибкой плате и управляется с помощью микросхемы nRF52 с низким энергопотреблением.
Питание робот получает от небольшой солнечной панели, установленной сверху на корпусе, или от антенны через радиоволны на частоте 2,4 гигагерц. Собираемая энергия используется для зарядки конденсаторов емкостью до 150 микрофарад, от которых затем питаются электромоторы, микроконтроллер и сенсоры. Так как энергия расходуется быстрее, чем поступает, то движение робота носит прерывистый характер. При этом для движения роботу достаточно лишь 50 микроватт. При наилучших условиях освещенности MilliMobile может развивать скорость до 5,5 миллиметров в секунду. Благодаря четырем фотосенсорам, установленным на корпусе, робот может самостоятельно искать источники света.
Грузоподъемность MilliMobile достигает трех грамм, что превышает собственную массу робота в три раза. При этом груз в один грамм снижает скорость робота примерно на 25 процентов. В качестве полезной нагрузки робот может нести на себе различные сенсоры, например, для сбора данных о температуре, влажности, величине магнитного поля, давлении атмосферы и уровне углекислого газа. Кроме того, робот способен переносить небольшую камеру (правда, для ее работы требуется много энергии).
Несколько роботов могут устанавливать устойчивое беспроводное соединение друг с другом или с базовой станцией на расстоянии до 200 метров. Таким образом рой MilliMobile может выступать в роли сети подвижных сенсоров, автономно собирающих информацию в течении длительного времени. Среди потенциальных вариантов применения авторы называют мониторинг состояния почв для нужд сельского хозяйства, наблюдение за утечками газа или обнаружение источников радиосигнала.