На выводимом из эксплуатации британском ядерном центре Winfrith впервые применён змеевидный робот для лазерной резки с целью демонтажа активной зоны реактора и удаления высокоактивных отходов.
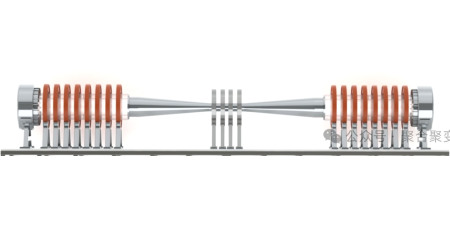
Работы по выводу из эксплуатации проводятся на газоохлаждаемом реакторе Dragon, эксплуатировавшемся с 1964 по 1976 год (не путать с одноимённым проектом китайского реактора). Целью является удаление сосуда диаметром 40 см, для продувки газа-теплоносителя (PGPC). Один конец сосуда закреплён в активной зоне реактора в области высокой радиоактивности, в то время как второй его конец находится за пределами многослойной защиты.
Змеевидный робот был разработан компаниями OC Robotics и TWI Робот по гранту, полученному от британского Агентства по выводу из эксплуатации ядерных объектов (NDA). Ранее этот робот был испытан в ядерном центре в Селлафилде.
На объекте Winfrith размещались 9 исследовательских реакторов. В 1990-х годах начались работы по его выводу из эксплуатации, которые для большинства реакторов уже завершены. В настоящее время на нём осталось два не до конца демонтированных реактора – прототипный тяжеловодный реактор и газоохлаждаемый реактор Dragon, от которого осталась только активная зона, окружённая бетонной защитой, семью слоями защитных металлических листов и внешним зданием защитной оболочки. Активную зону реактора планируется удалить к 2021 году, а оставшуюся установку снести к 2022 году. Большая часть территории Winfrith уже освобождена для последующего освоения.
Кроме того, сообщается, что учёные из Университета Линкольна разрабатывают системы искусственного интеллекта (ИИ), чтобы позволить самообучающимся роботам работать на опасных ядерных объектах. Планируется оснастить этих роботов алгоритмами для захвата, манипуляции и резки, а также картографирования и навигации. Этот проект финансируется за счёт гранта в объёме 1,1 млн фунтов стерлингов от Национального центра ядерной робототехники (NCNR).
Основная цель создания алгоритмов — разработка самообучающихся роботов, которые смогут адаптироваться к экстремальным условиям, особенно на радиоактивных ядерных объектах. В дальнейшем эти алгоритмы будут встроены в различные типы роботов, способных передвигаться в радиационно-опасных зонах. Планируется, что такие устройства будут дистанционно управляться операторами, однако разработчики не исключают и создание полностью автономных роботов.