В ходе ликвидации временных хранилищ радиоактивных отходов на территории НИЦ «Курчатовский институт» и вывода из эксплуатации исследовательских реакторов пришлось столкнуться с необходимостью использования робототехнических средств для выполнения работ в высоких радиационных полях [1-2]. Жесткие требования нормативных документов к величине индивидуальных дозовых нагрузок персонала, занятого на этих работах, при весьма ограниченной его численности заставили искать технологии обращения с РАО, позволяющие снизить дозовые нагрузки.
Желаемый результат дало применение робототехнических средств. В результате анализа рынка выбор пал на роботы шведской фирмы «Брокк». Во-первых, фирма выпускала внушительный модельный ряд механизмов – от небольших аппаратов типа «Брокк-50» или «Брокк-90», которые могли быть использованы для радиационной разведки, до мощных, энергоемких «Брокк-330» и «Брокк-400». Во-вторых, эта техника обладала хорошим ресурсом и показала весьма высокую наработку на отказ (надежность) при использовании во вредных производствах, в частности, при ремонте цементных или металлургических печей. В-третьих, для каждого робота из выпускаемого модельного ряда имелся широкий спектр навесного оборудования, а сами механизмы были оснащены универсальным быстросъемным разъемом, позволяющим производить замену навесного оборудования дистанционно, без непосредственного участия оператора.
Активное использование робототехнических средств позволило в течение пяти лет ликвидировать 10 временных хранилищ РАО и удалить радиоактивные отходы из ряда приобъектовых хранилищ НИЦ «Курчатовский институт», при этом индивидуальная годовая доза персонала не превышала десятой части от разрешенной. Опыт применения роботов, полученный в процессе реабилитации радиационно опасных объектов, в настоящее время используется в ходе работ по выводу из эксплуатации исследовательских реакторов МР и РФТ [3-4].
Методы наведения робототехнических средств на интенсивные источники γ-излучения
При выполнении работ по проектам вывода из эксплуатации исследовательских реакторов следует предусматривать как использование самих робототехнических средств, так и систем идентификации и локализации радиоактивных объектов и источников с интенсивным радиоизлучением. К таким системам относятся γ-локатор и γ-визор [5-6]. При их использовании следует принимать во внимание, что ядерно и радиационно опасный объект будет многократно обследоваться для определения уровней радиоактивного загрязнения, как в ходе комплексного инженерно-радиационного обследования, так и в процессе выполнения работ, с учетом того, что местоположение основных источников излучения относительно известно. Однако оснащение робототехнических средств γ- и видеокамерами позволяет эффективно наводить их на излучающий объект для последующей идентификации и удаления [7]. Это имеет решающее значение в технологических помещениях с высокой плотностью загрязненного оборудования, где идентификация и точная локализация наиболее мощных источников излучения дает возможность корректировать проект организации работ таким образом, чтобы удалить их в первую очередь. Это приводит к улучшению радиационной обстановки, что, в свою очередь, позволят интенсифицировать собственно демонтажные работы.
Измерительный блок системы также может быть установлен стационарно, геометрия объекта или помещения введена в память управляющих компьютеров и может использоваться для фиксации изменения условий в зоне работ в ходе демонтажа или резки радиоактивного оборудования, удаления защитных конструкций.
Для измерения уровней радиоактивного загрязнения используется γ-локатор, с помощью которого определяют уровни удельной или объемной активности оборудования и конструкций для их предварительной сортировки [5, 7]. Он позволяет измерять спектры излучения объектов и распределения интенсивности γ-излучения отдельных радионуклидов. На рисунке 1 представлено распределение относительного вклада излучения 60Со в мощность дозы в точке расположения γ-локатора. Измерения сделаны в помещении №64, где расположено оборудование водяной петлевой установки под давлением реактора МР.
 Рис. 1. Распределение относительного вклада излучения 60Со в мощность дозы в точке расположения γ-локатора
Рис. 1. Распределение относительного вклада излучения 60Со в мощность дозы в точке расположения γ-локатора
Демонтажные работы в помещениях, плотно заставленных оборудованием
Демонтаж оборудования контуров охлаждения реакторов и петлевых установок, расположенных вне бассейна реактора МР и шахты реактора РФТ, а также в помещениях с плотно установленным оборудованием осуществлялся с использованием роботов, оснащенных различными насадками. Это потребовало расширения существующих либо организации новых проемов в технологических помещениях для доставки в них техники и удаления контейнеров с РАО. Однако увеличение объема вспомогательных работ, которые проводились в условиях невысоких радиационных полей, в итоге существенно сократило время выполнения демонтажных работ, осуществленных полностью механизировано и дистанционно.
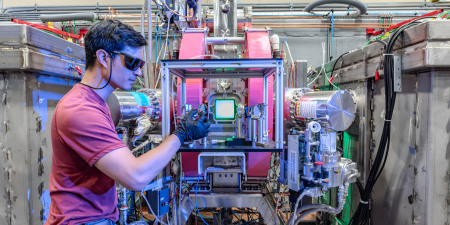
В качестве примера можно привести работы в помещении №66 петли с газовым охлаждением ПГ. Резка трубопроводов, удаление крепежных болтов, демонтаж вентилей и запорной арматуры выполнялись роботом (рис. 2).
 Рис. 2. Демонтаж оборудования с помощью робототехнического средства «Брокк-180»
Рис. 2. Демонтаж оборудования с помощью робототехнического средства «Брокк-180»
Это позволило осуществить работы в короткий срок и с минимальными дозовыми затратами. В результате помещение было полностью очищено от оборудования (рис. 3) и в дальнейшем использовалось для хранения демонтированного оборудования из помещений петлевых установок с водяным охлаждением.
 Рис. 3. Помещение №66 до демонтажа оборудования
Рис. 3. Помещение №66 до демонтажа оборудования
 Рис. 3. Помещение №66 после демонтажа оборудования
Рис. 3. Помещение №66 после демонтажа оборудования
Сортировка высокоактивных отходов по уровням суммарной активности
Другим примером использования робототехнических средств при обращении с высокоактивными отходами являются работы по фрагментации, сортировке и упаковке фрагментов петлевых каналов реактора МР, размещенных в бассейне-хранилище в центральном зале. Данные каналы являются длинномерными элементами контурного оборудования реактора и петлевых установок и имеют существенные конструктивные различия. Часть конструкций этих каналов, находившаяся в активной зоне реактора, подверглась интенсивному нейтронному облучению, остальная – загрязнению продуктами деления и активации. Эти особенности в значительной мере затрудняли работы по извлечению каналов из бассейна-хранилища, их фрагментации и удалению из центрального зала.
Для идентификации наиболее интенсивно излучающих частей петлевого оборудования использовались радиометрическая система, установленная на «Брокк-90» («Гамма-пионер»), дистанционно управляемая спектрометрическая система и портативная γ-камера «Гамма-визор» [8].
На первом этапе с помощью радиометрической системы «Гамма-пионер» производили сканирование канала, одновременно с помощью «Гамма-визора» получая его γ-изображение (рис. 4(2)).
. Распределение активности по длине канала") Рис. 4(2). Распределение активности по длине канала
Рис. 4(2). Распределение активности по длине канала
Нуклидный состав загрязнения сканируемых каналов определялся по спектру их излучения, измеренному с помощью спектрометрической системы «Гамма-локатор». После этого на основе анализа результатов сканирования и измерения спектров с помощью специально разработанных методик определялось распределение активности по длине каждого исследованного канала (рис. 4(1)).
. Распределение активности по длине канала") Рис. 4(1). Распределение активности по длине канала
Рис. 4(1). Распределение активности по длине канала
Анализ полученных результатов показал, что распределение активности по длине каналов в значительной мере является неравномерным, при этом наиболее радиационно-загрязненными являются части, которые находились в активной зоне.
На основе полученных данных определялись наиболее оптимальные места резки каналов для отделения высокоактивных частей оборудования от менее активных.
Для исключения разогрева циркониевых оболочек каналов работы по их резке и отделению высокоактивных фрагментов осуществлялись дистанционно под водой робототехническими средствами «Брокк-180» и «Брокк-330», оснащенными необходимым навесным оборудованием. Для этого был создан технологический стенд, заполненный водой и размещенный в реакторном зале. Фрагментируемое оборудование устанавливали на специальные подставки и с помощью гидроножниц отделяли высокоактивные части (рис. 5).
 Рис. 5. Стенд для резки каналов под водой с помощью робототехнических средств
Рис. 5. Стенд для резки каналов под водой с помощью робототехнических средств
Высокоактивные фрагменты помещали в защитные пеналы и удаляли в приреакторное хранилище высокоактивных отходов, а остальные части упаковывали в бетонные или металлические контейнеры и отправляли на длительное хранение в МосНПО «Радон».
Основные результаты работ
В результате работ, проведенных зимой-весной 2011-2012 годов, демонтировано 110 т оборудования в подвальных технологических помещениях петлевых установок ПГ, ПОВ, ПВО (помещения №№66, 66А, 66Б, 72, 64, 63), из них 53 т составили радиоактивные отходы суммарной активностью 5,0×1010 Бк. Извлечено, фрагментировано и упаковано 93 канала, суммарной активностью 2,6 ×1013 Бк по 60Со и 1,5×1013 Бк по 137Cs. Индивидуальные дозовые нагрузки сначала 2012 года не превысили 6 мЗв, что составляет менее трети контрольного годового уровня, установленного для занятого в работах персонала.
Литература
- Пономарев-Степной Н.Н. Извлечение радиоактивных отходов и ликвидация старых хранилищ в РНЦ «Курчатовский институт» / Н.Н. Пономарев-Степной, В.Г. Волков, Г.Г. Городецкий и др. // Атомная энергия. – 2007. – Т. 103, вып. 2. – С. 129-133.
- Волков В.Г. Ликвидация труднодоступного хранилища высокоактивных отходов РНЦ «Курчатовский институт» / В.Г. Волков, Ю.А. Зверков, О.П. Иванов и др. // Атомная энергия. – 2008. – Т. 105, вып. 3. – С. 164-169.
- Волков В.Г. Радиационное обследование исследовательского реактора МР / В.Г. Волков, А.Г. Волкович, В.И. Колядин и др. // Безопасность окружающей среды. – 2009. – №3. – С. 90-93.
- Волков В.Г. Подготовка к выводу из эксплуатации исследовательского реактора МР в РНЦ «Курчатовский институт» / В.Г. Волков, Ю.А. Зверков, В.И. Колядин и др. // Атомная энергия. – 2008. – Т. 104, вып. 5. – С. 259-264.
- Иванов О.П. Дистанционно управляемый коллимированный детектор для измерения распределения радиоактивных загрязнений / О.П. Иванов, В.Е. Степанов, С.В. Смирнов, А.С. Данилович // Атомная энергия. – 2010. – Т. 109, вып. 2. – С. 82-84.
- Иванов О.П. Новый подход к созданию портативной гамма-камеры с максимальным углом обзора / О.П. Иванов // Атомная энергия. – 2010. – Т. 108, вып. 1. – С. 46-50.
- Смирнов С.В. Система для дистанционных измерений распределения радиоактивных загрязнений для робота «Брокк» / С.В. Смирнов, В.Е. Степанов, А.С. Данилович, О.П. Иванов, В.Н. Потапов // Ядерная и радиационная безопасность России. – М., 2008. – Вып. 4, часть 4. – С. 13-17.
- Danilovich A. Radiological Survey of Contaminated Installations of Research Reactor before Dismantling in High Dose Conditions with Complex for Remote Measurements of Radioactivity / Alexey Danilovich, Oleg Ivanov, Alexey Lemus, et al // WM2012 Conference, 2012, February 26 – March, Phoenix, Arizona, USA, rep. 112069.
Автор

Семенов Сергей Геннадьевич, к.т.н.,
начальник НТЦ «Реабилитация» НИЦ «Курчатовский Институт»